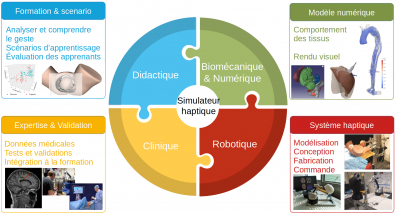
Thématiques
![]() Aide à l’apprentissage de gestes techniques (en santé) : simulateurs BirthSim, PeriSim, Sparte, de ponction ventriculaire ...
Aide à l’apprentissage de gestes techniques (en santé) : simulateurs BirthSim, PeriSim, Sparte, de ponction ventriculaire ...
![]() Assistance aux gestes complexes : coloscope "intelligent", bancs d’étude de la
Assistance aux gestes complexes : coloscope "intelligent", bancs d’étude de la
proprioception pour l’INSERM, sonde haptique pneumatique de télé-échographie)
![]() Évaluation du geste : intégrée dans les simulateurs précédents
Évaluation du geste : intégrée dans les simulateurs précédents
Originalité
![]() Réponse à des cas concrets émis par nos partenaires (médecins, industriels)
Réponse à des cas concrets émis par nos partenaires (médecins, industriels)
![]() Simulateurs complets (tangibles, haptiques + évaluation)
Simulateurs complets (tangibles, haptiques + évaluation)
![]() Commande innovante pour l’haptique (position/effort/raideur)
Commande innovante pour l’haptique (position/effort/raideur)
![]() Utilisation d’actionneurs multi-énergies (électrique + pneumatique)
Utilisation d’actionneurs multi-énergies (électrique + pneumatique)
![]() Du besoin au prototype démonstrateur (preuves de concept)
Du besoin au prototype démonstrateur (preuves de concept)
Verrous scientifiques traités
Pour la simulation pédagogique
![]() Modélisation du vivant
Modélisation du vivant
![]() Commande haptique fidèle au réel
Commande haptique fidèle au réel
![]() Commande multi-énergie pour optimiser l’actionnement
Commande multi-énergie pour optimiser l’actionnement
![]() Couplage modèle numérique et interface haptique
Couplage modèle numérique et interface haptique
Démarche
Concernant spécifiquement l’évaluation des gestes :
![]() Définition de métriques
Définition de métriques
![]() Analyse cinématique, dynamique et énergétique
Analyse cinématique, dynamique et énergétique
![]() Choix et usage d’outils d’IA pour l’analyse des données
Choix et usage d’outils d’IA pour l’analyse des données
Réalisations
2 exemples de simulateurs haptiques d’apprentissage du geste :
![]() pour la pose de péridurale (image du haut, ci-dessous)
pour la pose de péridurale (image du haut, ci-dessous)
![]() pour des infiltrations intra-articulaires (images du bas)
pour des infiltrations intra-articulaires (images du bas)
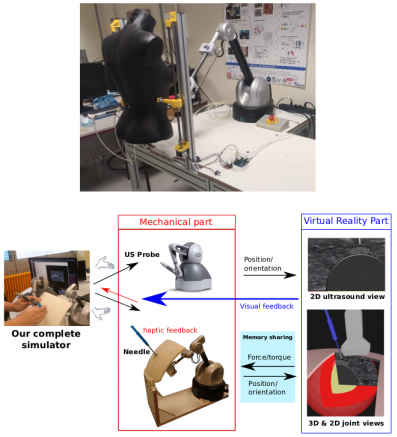
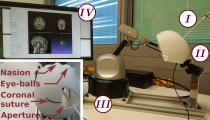
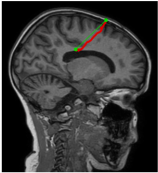
Exemple de couplage modèle numérique et interface haptique sur un simulateur de ponction ventriculaire : affichage temps-réel sur image IRM de la position du catheter.
Exemple d’architecture "dual-user" pour la simulation haptique supervisée où le formateur participe activement à la simulation aux côtés de l’apprenant, chacun sur sa propre interface haptique.

Exemple pour le simulateur d’accouchement BirthSim :
