Objectifs
Le simulateur BirthSIM est un simulateur d’accouchement dédié à la formation sans risque des obstétriciens et des sages femmes. Il s’agit de reproduire la phase de travail d’un accouchement afin de permettre aux obstétriciens et aux sages femmes d’apprendre les gestes corrects sans risque pour les futures mères.
Contexte
A l’heure actuelle, la formation en obsétrique se déroule principalement en salle d’accouchement lors de véritables accouchements : les obsétriciens et les sages femmes appliquent leur savoir faire purement théorique directement en salle d’accouchement.
Un simulateur d’accouchement permet d’acquérir une première expérience avant de suivre la formation classique en salle d’accouchement. Pour être réaliste et donc augmenter l’immersion de la simulation, le simulateur doitreproduire fidèlement non seulement l’anatomie du bassin maternel mais aussi les forces mises en jeu. Il doit également permettre d’analyser le geste réalisé afin de proposer son évaluation objective ; il doit enfin proposer une méthode de formation pour améliorer l’apprentissage de ce geste.
Source de financement : Région Rhône Alpes et Ministère de l’Ens. Sup. et de la Recherche, ANR (Projet SAGA), pôle de compétitivité IMAGINOV
Période : de 2001 à aujourd’hui
Mots clés
robotique médicale : simulateur médical pour l’apprentissage ; automatique ; commande de systèmes Fluid Power ; analyse et évaluation de gestes médico-chirurgicaux
Verrous
![]() Verrous technologiques
Verrous technologiques
Choix de l’actionneur pour reproduire fidèlement les forces mises en jeu ;
Choix des paramètres permettant de caractériser le geste réalisé ; choix des capteurs ;
Les mesures in vivo ne sont pas forcément possibles.
![]() Verrous scientifiques
Verrous scientifiques
Choix de la commande pour reproduire différents types d’accouchement ;
Modélisation du système pour développer et tester de nouvelles lois de commande et dimensionner ces composants ;
Caractérisation d’un geste médical, détermination des paramètres définissant la signature d’un geste ;
Evaluation et la comparaison d’un geste médical par rapport à un autre geste médical ;
Simulation virtuelle des interactions entre les organes maternels et le foetus ;
Couplage entre la simulation virtuelle et la simulation physique.
Personnels d’AMPERE impliqués
![]() Tanneguy REDARCE (PU) - Xavier BRUN (PU) - Richard MOREAU (MCF) - Minh Tu PHAM (MCF)
Tanneguy REDARCE (PU) - Xavier BRUN (PU) - Richard MOREAU (MCF) - Minh Tu PHAM (MCF)
![]() Nicolas HERZIG, thésard 2012-2015 (projet SAGA)
Nicolas HERZIG, thésard 2012-2015 (projet SAGA)
Collaborations
![]() Pierre BOULANGER, Professor, AMMI Lab, University of Alberta, Edmonton, Canada
Pierre BOULANGER, Professor, AMMI Lab, University of Alberta, Edmonton, Canada
![]() Florence ZARA, Fabrice Jaillet, MCF, Laboratoire LIRIS, UCBL, Université de Lyon
Florence ZARA, Fabrice Jaillet, MCF, Laboratoire LIRIS, UCBL, Université de Lyon
![]() Olivier DUPUIS, PUPH, Hôpital Lyon Sud, HCL, Université de Lyon
Olivier DUPUIS, PUPH, Hôpital Lyon Sud, HCL, Université de Lyon
Publications "Ampère" liées à BirthSIM
![]() Thèses sontenues
Thèses sontenues
Ruimark SILVEIRA (thèse soutenue le 06/12/2004 à l’INSA de Lyon) : Modélisation et conception d’un nouveau simulateur d’accouchement (BirthSIM) pour l’entraînement et l’enseignement des jeunes obstétriciens et des sages femmes.
Olivier DUPUIS (thèse soutenue le 30/03/2005 à l’INSA de Lyon) : Apport du forceps instrumenté dans la sécurité de l’extraction instrumentale
Osama OLABY (thèse soutenue le 22/11/2006 à l’INSA de Lyon) : Robotique pour l’apprentissage de gestes médicaux. Mise en oeuvre de séquences d’accouchement automatisées.
Richard MOREAU (thèse soutenue le 05/12/2007 à l’INSA de Lyon) : Le simulateur d’accouchement BirthSIM : un outil complet pour la formation sans risque en obstétrique.
Romain BUTTIN (thèse soutenue le 08/10/2010 à l’Université Claude Bernard Lyon 1) : Modélisation biomécanique du système reproductif féminin et du foetus pour la réalisation d’un simulateur virtuel d’accouchement.
![]() Presse internationale et nationale :
Presse internationale et nationale :
NewScientist (Mai 2008), Wired (Mars 2011)
Le Progrès (Juin 2006), TLM, 20 minutes (Mars 2011), Le Progrès (Mars 2011), Ouest France (Mars 2011)
![]() Publications extraites de la base HAL
Publications extraites de la base HAL
_________________
Description du simulateur d’accouchement
Développé en collaboration avec les Hospices Civils de Lyon (HCL), le simulateur BirthSIM permet de simuler différents types d’accouchement (accouchements eutociques et instrumentaux). Ainsi, l’actionneur pneumatique est couplé avec un servodistributeur et commandé en effort, en position, en effort/position, en effort/vitesse et en position avec un gain variable selon les procédures souhaitées par le médecin instructeur.
L’instrumentation des forceps a permis de faire l’analyse des gestes effectués à l’aide de méthodes originales (étude de la courbure des positions et des quaternions) afin d’obtenir une évaluation de ceux-ci.
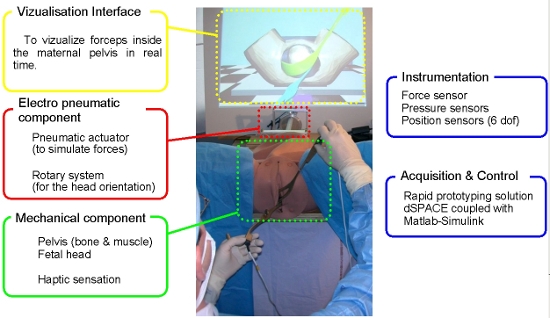
Il est constitué de trois parties :
![]() une partie mécanique pour reproduire l’anthropomorphisme du bassin maternel et du fœtus ;
une partie mécanique pour reproduire l’anthropomorphisme du bassin maternel et du fœtus ;
![]() une partie électro-pneumatique pour reproduire les efforts mis en jeu pendant un accouchement (pouVerrou scientifiquessées maternelles, contractions utérines et résistance des muscles pelviens)
une partie électro-pneumatique pour reproduire les efforts mis en jeu pendant un accouchement (pouVerrou scientifiquessées maternelles, contractions utérines et résistance des muscles pelviens)
![]() une partie visualisation pour observer les éléments mobiles en temps réel à l’intérieur du bassin maternel
une partie visualisation pour observer les éléments mobiles en temps réel à l’intérieur du bassin maternel